This is a library to keep track of the PMIC and its configuration. More...
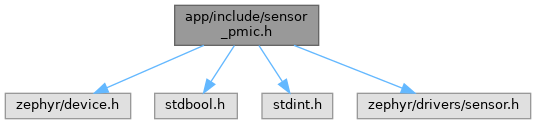
#include <zephyr/device.h>#include <stdbool.h>#include <stdint.h>#include <zephyr/drivers/sensor.h>
Include dependency graph for sensor_pmic.h:
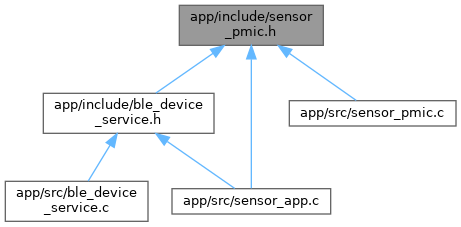
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | pmic_sensor_status_t |
| Structure for the PMIC sensor status. More... | |
| struct | sensor_pmic_ops_t |
| Structure containing function pointers for PMIC operations. More... | |
Functions | |
| int | sensor_pmic_init_with_ops (const sensor_pmic_ops_t *ops) |
| Initialize the PMIC with custom operations. | |
| int | sensor_pmic_init (void) |
| Initialize the PMIC, with default operations. | |
| int | sensor_pmic_led_on (void) |
| Turn on the LED. | |
| int | sensor_pmic_led_off (void) |
| Turn off the LED. | |
| int | sensor_pmic_status_get (pmic_sensor_status_t *status) |
| Get the status of the PMIC sensors. | |
Detailed Description
This is a library to keep track of the PMIC and its configuration.
- Version
- 0.1
- Date
- 2025-06-16
- Copyright
- Copyright (c) 2025
Function Documentation
◆ sensor_pmic_init()
| int sensor_pmic_init | ( | void | ) |
Initialize the PMIC, with default operations.
- Returns
- int 0 on success, negative error code on failure
◆ sensor_pmic_init_with_ops()
| int sensor_pmic_init_with_ops | ( | const sensor_pmic_ops_t * | ops | ) |
Initialize the PMIC with custom operations.
- Parameters
-
ops Pointer to operations structure. If NULL, default operations will be used
- Returns
- int 0 on success, negative error code on failure
◆ sensor_pmic_led_off()
| int sensor_pmic_led_off | ( | void | ) |
Turn off the LED.
- Returns
- int 0 on success, negative error code on failure
◆ sensor_pmic_led_on()
| int sensor_pmic_led_on | ( | void | ) |
Turn on the LED.
- Returns
- int 0 on success, negative error code on failure
◆ sensor_pmic_status_get()
| int sensor_pmic_status_get | ( | pmic_sensor_status_t * | status | ) |
Get the status of the PMIC sensors.
- Parameters
-
status Pointer to the status structure
- Returns
- int 0 on success, negative error code on failure